17 novembre 2017 • 18 • 4.5
Le Raspberry permet de réaliser divers projets de robotique. Le servo moteur est un composant très souvent utilisé
dans ce domaine. En effet, ce n'est pas un simple moteur, il est "intelligent". On va pouvoir lui
demander d'aller à une certaine position, et il va exécuter les ordres, sans avoir besoin d'ajouter de capteurs
de fin de courses, etc. Malheureusement, sa course de sortie n'est que de 180°.
D'autres types de servo moteurs existent, comme les Servo
treuil. Ils
offrent une course de sortie de plus de 3 tours mais sont plus cher.
Prérequis
Pour contrôler un Servo moteur à l'aide d'un Raspberry, il faut :
- Un Raspberry Pi
- Un Servo Moteur
- Une résistance 1KΩ
- Des câbles
- Une alimentation en plus de celle du Raspberry (4 piles AAA ou une batterie externe 5V)
Une fois tous les éléments réunis, on peut passer au branchement.
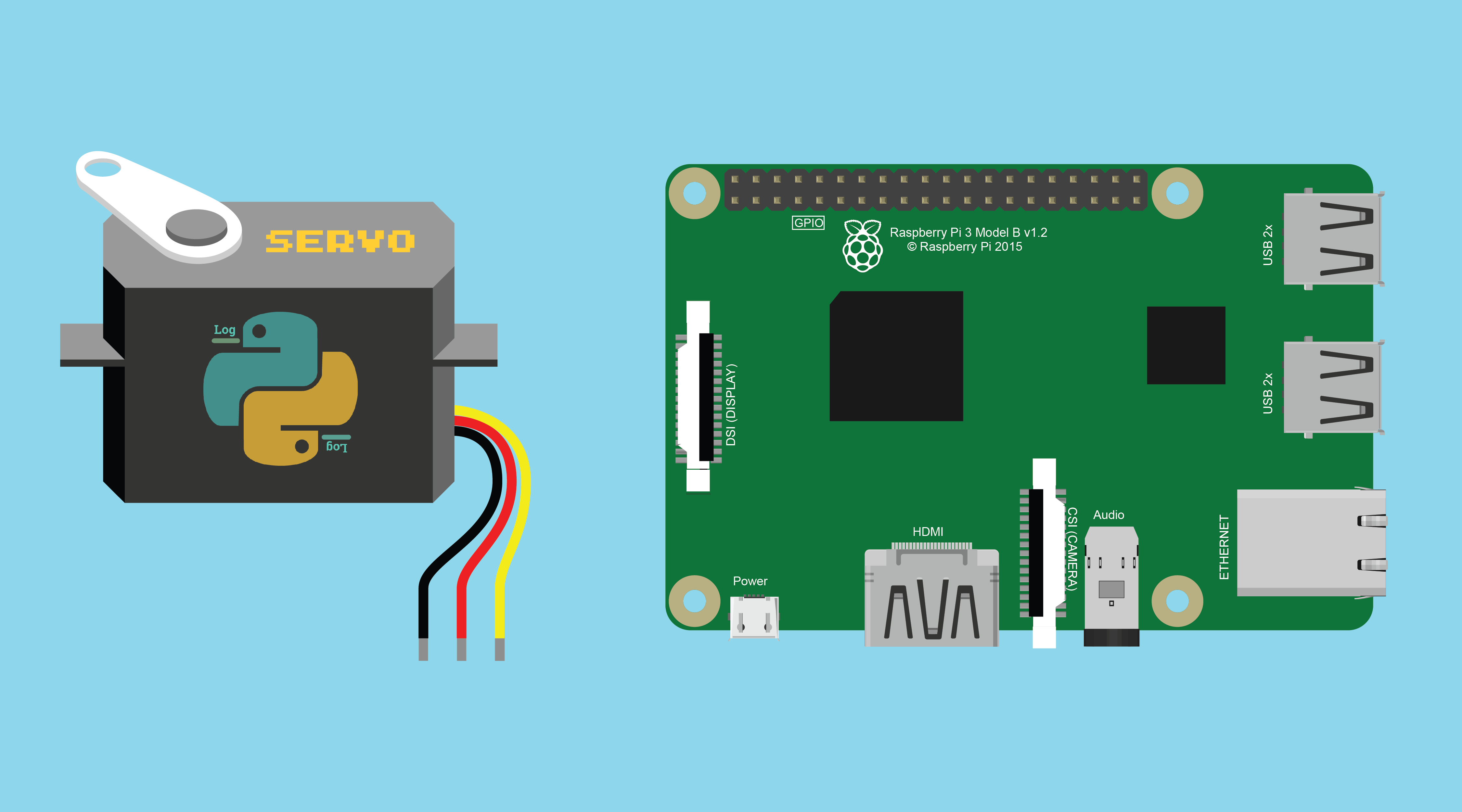
Connexion du Servo au Raspberry
Le Servo moteur possède 3 fils :
Le fil rouge : +5V;
Le fil noir : GND, 0V;
Le fil blanc/jaune : fil de data, où les ordres circulent du Raspberry vers le Servo.
Pour alimenter le Servo, il est préférable d'utiliser une alimentation externe de 5V, surtout si
l'alimentation de votre Raspberry délivre peu de courant.
Le Servo se branche donc comme ceci :


Programmation
Une fois que tout est branché correctement, on peut passer à la programmation. Pour contrôler le Servo moteur, voici un programme Python qui permet de :
Demander au Servo d'atteindre une position (un angle), qu'il maintiendra pendant une durée déterminée,
Lui demander de faire des allers-retours de 0° à 180°
Ce programme est évidemment là pour être modifié et adapté aux besoins de votre projet, donc à vous de jouer !
A lire

Choisir et utiliser une caméra sur un Raspberry Pi

Obtenir la température avec une sonde DS18B20
Incontournables Amazon #sponsorisé

⚡NEW⚡Raspberry Pi 5, version 8Go
88.90 €


Caméra Raspberry Pi 5MP 1080p
12.95 €
